발전소 제어로직이란 정확히 무엇이며, 보일러와 터빈은 어떻게 함께 움직이는 것일까요? 제어로직은 수만 개의 밸브와 모터를 0.1초 단위로 조율하는 발전소의 두뇌입니다. 중앙제어실(MCR)의 지령 한 번이 현장 설비를 움직이는 과정에는 수십 년간 축적된 제어 공학의 노하우가 복잡한 알고리즘으로 구현되어 있습니다.
발전소 제어의 핵심 난제는 덩치가 커서 반응이 느린 ‘보일러’와 밸브 조작만으로 즉각 반응하는 예민한 ‘터빈’ 사이의 속도 차이(Time Lag)를 조율하는 것입니다. 이 글에서는 제어로직 계층의 최상위인 Unit Master부터, 보일러의 열적 관성(Thermal Inertia)을 극복하는 BRL Master, 그리고 안전 로직까지 SAMA 도면 기반으로 분석합니다.
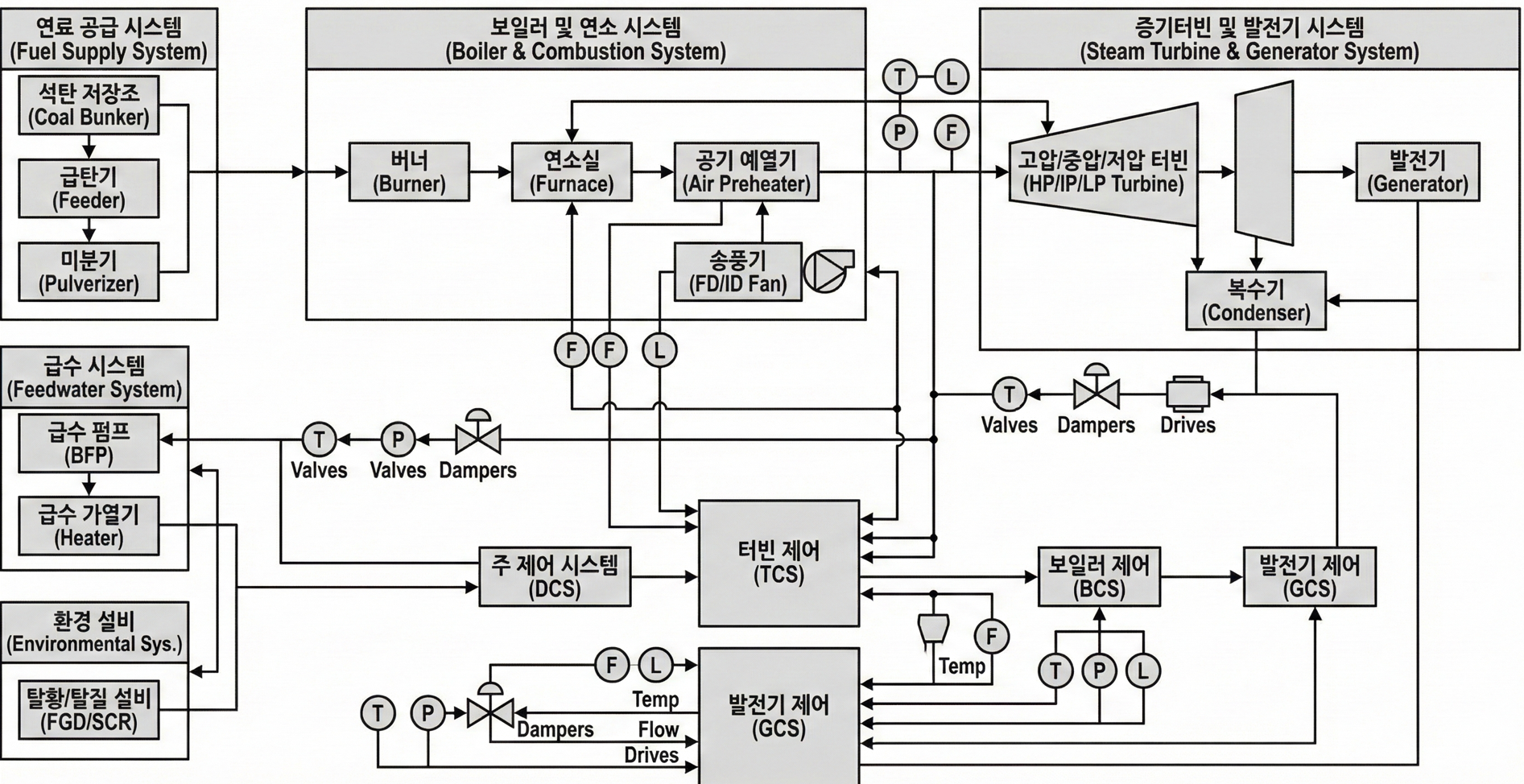
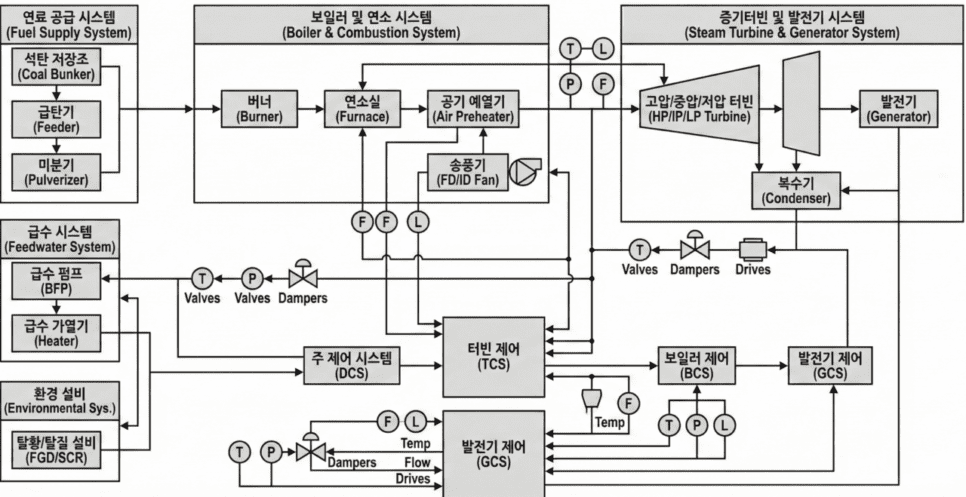
▲ SAMA 표준 기호로 표현된 연료 제어 및 Cross Limit 로직의 흐름
제어로직의 최상위 지휘자: Unit Master와 CCS 운전 모드
발전소 제어 시스템의 최상위에는 Unit Master가 존재합니다. 전력거래소(KPX)의 급전 지시(ADS)나 목표 부하(Target Load)를 받아, 보일러와 터빈 각각에 “얼마나 일해야 하는지” 지령을 내립니다. 이 두 설비를 어떻게 연동하느냐에 따라 운전 모드가 결정되는데, 이를 CCS(Coordinated Control System, 협조 제어)라고 합니다.
| 제어 모드 | 주도권 (Master) | 작동 원리 및 특징 |
|---|---|---|
| Boiler Follow | 터빈 (Turbine) | 터빈이 먼저 밸브를 열어 출력을 맞추면 보일러가 뒤따라 압력을 복구합니다. 출력 응답성은 빠르지만 주증기 압력이 불안정해질 수 있어 정상 운전에는 잘 쓰이지 않습니다. |
| Turbine Follow | 보일러 (Boiler) | 보일러가 먼저 연소를 늘려 압력을 올리면 터빈이 그에 맞춰 밸브를 엽니다. 압력은 안정적이나 출력 반응이 느려 기동 초기나 비상 시에 주로 사용합니다. |
| Coordinated (CCS) | 동시 제어 | Unit Master가 보일러와 터빈에 동시에 신호를 보냅니다. 터빈의 빠른 응답성으로 초기 출력을 확보하고 보일러의 선행 제어로 압력을 유지하는 표준 운전 모드입니다. |
Unit Master는 운전원이 설정한 목표값만 쫓지 않습니다. 전력 계통의 주파수가 60Hz에서 벗어나면 이를 보정하기 위해 자동으로 출력을 증감시키는 주파수 조정(Frequency Control) 로직이 최우선으로 개입합니다. 관련된 터빈 동기 속도 원리는 발전소 터빈이 3600rpm으로 도는 이유에서 확인할 수 있습니다. CCS는 이런 외란(Disturbance)까지 고려하여 최종 부하 요구량(ULD)을 생성하죠.
보일러 제어의 심장: BRL Master 3단계 알고리즘
BRL(Boiler Rate Loop)은 Unit Master가 보낸 전기적 신호(MW)를 실제 보일러가 태워야 할 열량(Kcal/h)으로 변환하는 핵심 두뇌입니다. 보일러는 덩치가 커서 불을 때도 증기 압력이 오르기까지 시간이 걸리는 열적 관성(Thermal Inertia)이 큽니다. BRL은 이를 극복하기 위해 세 가지 정교한 기법을 사용합니다.
- 피드포워드 (Feedforward): 부하 변화율을 감지하여 실제 압력이 떨어지기 전에 연료를 선제적으로 과잉 공급(Over-firing)합니다. 보일러의 느린 반응 속도를 예측으로 보상하는 방식입니다.
- 피드백 (Feedback): PID 제어기가 설정 압력(SP)과 실제 압력(PV)의 차이를 계산하여 연료량을 미세 조정(Trim)합니다. 피드포워드가 큰 그림을 그린다면 피드백은 디테일을 완성합니다.
- 열량 보정 (Calorific Correction): 현재 투입 연료량 대비 실제 발생 증기량(Steam Flow)을 실시간으로 비교하여 연료의 발열량 변화를 자동 보정합니다. 산지마다 다른 석탄 발열량에 스스로 적응하는 로직입니다.
최후의 안전장치: Cross Limit과 Runback
발전소 제어로직은 성능보다 ‘안전’을 최우선으로 설계됩니다. 설비를 보호하기 위한 로직은 절대 타협하지 않는 철칙(Hard Logic)으로 구현됩니다. 신뢰성 있는 계측 입력값이 전제가 되어야 하며, 이에 대한 내용은 발전소 계측기 종류와 원리에서 확인할 수 있습니다.
보일러 연소 제어의 대원칙은 “공기는 먼저, 연료는 나중에”입니다. 공기보다 연료가 많아지면 불완전 연소로 인해 보일러 내부에 미연 가스가 차고 폭발(Puffing) 사고로 이어질 수 있습니다.
- 부하 상승 시: 공기량을 먼저 늘린 후, 실제 공기량이 확보된 것을 확인하고 연료량을 늘립니다.
- 부하 하강 시: 연료량을 먼저 줄인 후, 실제 연료가 줄어든 것을 확인하고 공기량을 줄입니다.
이 로직을 통해 어떤 과도 상태에서도 항상 과잉 공기(Fuel-Lean) 상태를 강제합니다.
운전 중 주요 보조기기(대형 송풍기, 급수펌프 등)가 고장으로 갑자기 정지(Trip)하면, 제어로직은 이를 즉시 감지하여 발전 출력을 안전한 수준(보통 50%)으로 초고속으로 감소(Runback)시킵니다. 발전소 전체가 블랙아웃(Trip)되는 최악의 상황을 막기 위한 최후의 방어선입니다.
SAMA 도면으로 보는 연료 제어 흐름: BRL Master에서 급탄기까지
엔지니어들이 현장에서 보는 제어로직 도면(SAMA Diagram)을 기반으로, BRL Master에서 생성된 신호가 어떻게 급탄기(Feeder)를 움직이는지 4단계로 추적합니다.
- Step 1. 주증기 압력 제어기: 설정 압력(SP)과 실제 압력(PV)의 오차를 PID 제어기가 계산하여 기초적인 보일러 마스터 출력값을 생성합니다.
- Step 2. 피드포워드 합산: Step 1의 값에 발전 출력 요구량(ULD)을 변환한 신호를 더합니다. 압력이 떨어지기를 기다리지 않고 즉시 반응하여 BIR(Boiler Input Rate)이 탄생합니다.
- Step 3. Cross Limit (Low Select): BIR 신호와 ‘현재 공기량’ 중 작은 값을 선택합니다. 송풍기 고장으로 공기량이 줄어들면 연료 요구량도 강제로 삭감하여 과농 연소를 방지합니다.
- Step 4. 연료 마스터 제어기: Step 3을 통과한 ‘안전한 연료 요구량’을 목표값으로 삼고, 실제 투입 연료량(PV)과 비교하는 PID 제어기가 급탄기 모터 회전수(RPM)를 최종 조절합니다.
헌팅(Hunting)과 PID 튜닝: 현장 엔지니어의 핵심 과제
제어로직 설계가 아무리 완벽해도, 현장 시운전 단계에서는 ‘헌팅(Hunting)’이라는 복병을 만납니다. 헌팅은 제어 밸브나 댐퍼가 목표값을 찾지 못하고 계속 열렸다 닫혔다를 반복하며 출렁이는 현상입니다. PID 제어기의 이득(Gain) 값을 너무 높게 잡았을 때 발생하죠.
반대로 안정성만 추구하면 반응이 굼떠서 급변하는 전력 수요를 따라가지 못합니다. ‘빠릿함’과 ‘안정감’ 사이의 황금비율을 찾는 PID 튜닝(Tuning)이 제어 품질의 핵심입니다. 특히 부하가 급변하는 과도 상태(Transient)에서는 자동 제어를 풀고 수동(Manual)으로 개입해야 할 때도 있습니다. 최고의 제어로직은 완벽한 코드가 아니라, 현장 설비 특성을 끈질기게 관찰하고 맞춰가는 엔지니어의 손끝에서 완성됩니다.
- CCS(협조 제어): Unit Master가 보일러(Source)와 터빈(Sink)을 동시 제어하여 안정적인 출력을 생성하는 표준 운전 모드
- BRL Master: Feedforward로 예측하고 Feedback으로 보정하여 보일러의 느린 응답성을 극복하는 열량 제어 알고리즘
- Cross Limit: 공기량 대비 연료량을 항상 안전 범위 내로 강제하는 연소 보호 로직
- Runback: 보조기기 트립 시 출력을 자동으로 안전 수준까지 급감발시키는 최후 보호 수단
발전소 제어로직은 수십 년간 축적된 엔지니어링 경험의 결정체입니다. 수만 줄의 코드와 로직 블록들이 거미줄처럼 얽혀 있지만, 그 중심에는 ‘안정’과 ‘효율’이라는 명확한 철학이 담겨 있습니다. 현장 튜닝이나 DCS 로직 수정에 대해 더 깊은 논의가 필요하다면 댓글로 남겨주시기 바랍니다. 발전소 제어로직의 국제 표준과 최신 연구 동향은 IEA 디지털화 및 에너지 보고서에서 확인할 수 있습니다.